22 KiB
Table of Contents
- Development manual
Development manual
This document gives an overview of the internal structure of the PuzzleFW firmware package. It also describes the process to build the FPGA firmware and the embedded software.
FPGA design overview
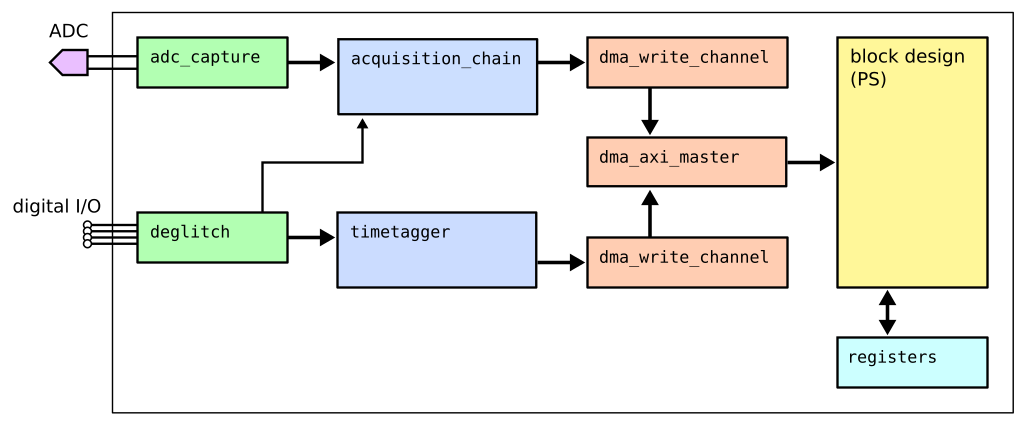
The FPGA captures ADC samples and digital input signals. ADC samples go into the analog acquisition chain. The acquisition chain handles triggering and optional downsampling. A configurable number of samples are collected following each trigger event. Trigger events and collected samples are transferred to a buffer in DDR memory via the AXI slave interface of the Zynq processing system.
Digital signals go into a timetagger subsystem. The timetagger detects edges on selected signals and assigns timestamps to such events. Timestamped events are transferred to a buffer in DDR memory via the AXI slave interface.
All synchronous elements are clocked at 125 MHz, derived from the ADC sample clock.
Block design
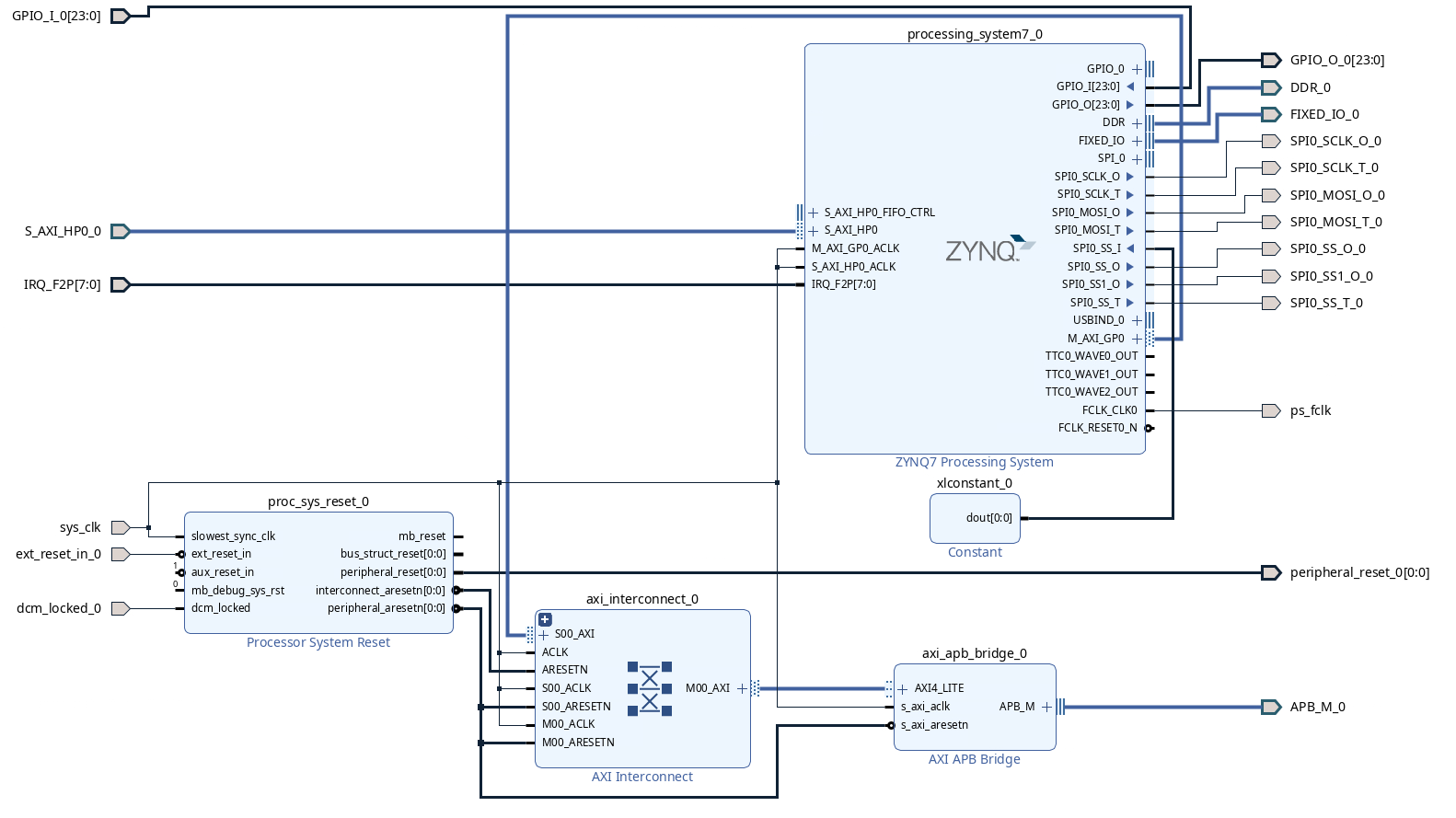
A Vivado block design contains the Zynq processing system (ARM), AXI interconnect, and AXI-to-APB bridge. This block design is instantiated in the top-level VHDL file.
PS-to-PL interfaces
The following interfaces are used between the PS (ARM) and PL (FPGA):
- M_AXI_GP0
Used by embedded software to read and write registers in the FPGA via AXI and APB bus. This interface is mapped to addresses 0x43000000 to 0x431fffff in the PS address map. - S_AXI_HP0
Used by FPGA firmware to read and write DDR memory. - GPIO
The PS controls a few specific digital signals in the FPGA via GPIO lines. One of these lines is a global reset signal for the FPGA firmware. - SPI0
Routed via EMIO through the FPGA to the SPI bus of the ADCs (only on 4-input boards). - IRQ_F2P
Used by FPGA firmware to trigger interrupts in the PS. - FCLK_CLK0
Fixed 200 MHz clock generated by the PS. On 4-input boards, the FPGA uses this clock as reference for IODELAY primitives. On 2-input boards, this clock is not used.
ADC input timing
The ADC transfers samples via a parallel source-synchronous interface. The interface is synchronous to a 125 MHz clock output signal from the ADC. This is also the main clock source of the FPGA design.
On 2-input Red Pitaya boards, the ADC is hardwired to operate in full rate CMOS mode. Each analog channel has 14 parallel data signals from ADC to FPGA. These data signals transition on the falling clock edge and are captured by the FPGA on the rising clock edge. Data signals are captured in the FPGA in IOB flip-flops. These flip-flops are clocked on a 125 MHz clock, derived by a PLL from the ADC output clock. It turns out that a phase shift of 90 degrees in the PLL provides near-optimal timing for capturing the data signals. This follows from synthesizer timing reports and has been confirmed experimentally by testing different PLL phase shift settings.
On 4-input Red Pitaya boards, only 7 parallel data signals per analog channel are connected from the ADCs to the FPGA. The ADCs must be programmed (via SPI) to operate in double data rate CMOS mode. In this mode, the data lines transition on both edges of the 125 MHz clock. The data signals are routed through IDELAY components in the FPGA before being captured in IDDR registers. The IDDR are clocked on the 125 MHz clock from the ADC that produces the samples (without PLL). The IDELAY components use a fixed delay, tuned to 2.34 ns to optimize data capture timing. Timing reports indicate that this provides sufficient margin. This has been confirmed experimentally by testing different phase-shift settings of the ADC output clock. The main FPGA design runs on a 125 MHz clock, derived by a PLL from the ADC that samples channels 1 and 2. Transferring samples from channels 3 and 4 to the main clock is slightly tricky because the two ADC clocks may be skewed with respect to each other. A few mysterious timing constraints were added to deal with this.
Embedded software overview
The purpose of the embedded software is to make the system remotely accessible via the network. The software collects data from the FPGA and transmits it via TCP. Similarly, the software accepts remote control commands via TCP and executes these by accessing registers in the FPGA.
Operating system
The embedded software runs within an embedded Linux system on the Red Pitaya.
The core operating system is based on Buildroot, a framework that builds an embedded Linux system from scratch. Buildroot automatically downloads and builds many additional open source packages that are needed to construct the embedded system. Among these packages is a cross-compilation toolchain.
The kernel for the embedded system is built from the Xilinx distribution of the Linux kernel. It is necessary to use the Xilinx variant of Linux. The vanilla Linux kernel can run on the Red Pitaya, but the Xilinx kernel provides important features that are missing from the vanilla kernel, such as programming the FPGA.
The shell and system utilities of the embedded system are based on Busybox. Dropbear is installed as SSH server, but disabled by default.
The set of packages to be installed in the embedded system, along with their compile-time settings, are specified in the Buildroot configuration. Further tweaking of the embedded system is done via a filesystem overlay: a set of files that are injected into the embedded root filesystem as a final step. The overlay mechanism is used to install boot scripts and configuration files. It is also used to install custom user space software.
Boot flow
U-Boot is used as boot loader and as secondary program loader (SPL). Building U-Boot requires a proper device tree for the board.
Building the U-Boot SPL image also requires the file ps7_init_gpl.c.
The contents of this file depend on the configuration of the Zynq programming system which is specified in the Vivado block design.
To generate this file, the FPGA design must be exported from Vivado in the form of an XSA file.
The XSA file is actually a ZIP archive which contains ps7_init_gpl.c and the corresponding header file.
The U-Boot build script (12_build_uboot.sh) copies these files to the correct location in the U-Boot source tree.
The boot process of the Red Pitaya is as follows:
-
The Zynq PS boots from ROM. The ROM program reads
boot.binfrom the SD card and runs it. -
boot.binis the U-Boot SPL image. It initializes many subsystems in the Zynq PS, including the DDR memory controller. It then readsu-boot.imgfrom the SD card and runs it.Note that we don't use a Xilinx FSBL at all. Many Zynq tutorials explain how to build
boot.binusing Xilinx tools. That requires a non-free FSBL image which must be built in a Vitis project. The PuzzleFW package avoids that whole mess by using U-Boot SPL instead. -
u-boot.imgis the main U-Boot program image. It reads and executesboot.scr, a script which describes the Linux boot process. The script instructs U-Boot to read the Linux kerneluImage, the device treedevicetree.dtband the root filesystem imagerootfs.cpio.ubootfrom the SD card. It then runs the Linux kernel. -
uImageis the Linux kernel image. The kernel initializes drivers and subsystems. The root filesystem is unpacked and mounted as a RAM filesystem. The filesystem is writeable, but any changes remain in RAM and will be forgotten on the next reboot. -
A set of boot scripts are invoked to initialize the embedded system and start services. Most of these scripts are prepared by Buildroot, but some scripts have been tweaked or specially created for PuzzleFW. These scripts take care of the following:
- Read the MAC address from the EEPROM on the Red Pitaya board, and assign it to the Ethernet interface.
- Set a unique hostname
rp-XXXXXXbased on the MAC address. - Obtain an IPv4 address via DHCP or a preconfigured static address. This is controlled by a file in the configuration partition of the SD card.
- Start an SSH server, if enabled. By default, this is disabled.
- Read a BIT file from the SD card and program the FPGA. Information in the EEPROM is used to determine which FPGA image must be used.
- Configure ADCs on the Red Pitaya board via SPI or GPIO.
- Load the Linux kernel driver to access the FPGA firmware.
- Run a user space program that accepts remote control commands via TCP.
Linux kernel driver
A custom Linux kernel module is used to access the FPGA firmware.
This module is called puzzlefw.ko.
The driver is based on the Linux UIO framework. The kernel module itself has minimal functionality. Its only functions are:
- mapping the register address range of the FPGA to user space via mmap
- mapping the DMA buffer to user space via mmap
- handling FPGA interrupts and notifying user space via UIO
All non-trivial interactions with the FPGA are done in user space. This includes managing the DMA data flow.
User space software
The FPGA firmware is controlled by a user space program. This program accepts remote control commands via TCP. Commands are handled by reading and writing registers in the FPGA. The program also collects data from the FPGA via DMA, and transmits these data through the network via TCP.
The program is written in C++. It uses Boost Asio, an asynchronous I/O framework.
Configuration partition
While the embedded software runs, the root filesystem is located in RAM. The filesystem is writable, but any changes will be lost on the next boot.
In order to store persistent settings, the SD card has a separate configuration partition.
This is /dev/mmcblk0p2, formatted as Ext4.
The following files are stored there:
network.conf: IP address configuraton (DHCP or static IP address)calibration.conf: analog calibration coefficientsstart_ssh.conf: enables or disables starting the SSH server- SSH host key
The configuration partition is temporarily mounted read-only during boot, to read the configuration files. Otherwise, the partition is only accessed when the configuration is modified. In such cases, the partition is temporarily mounted to write the updated files, then unmounted again. As a result, writes to the SD card occur only when the user changes the persistent configuration of the system. This avoids unnecessary wear of the SD card.
Build procedure
A Linux PC (x86-64) is required to build the system. Development was done with Debian 12 (bookworm). Other Linux distributions will probably also work.
The build process consists of two main steps. These steps must be done in the following order:
- Build the FPGA firmware for the Zynq PL.
- Build the embedded software for the Zynq PS.
Building FPGA firmware
Building the FPGA firmware requires Vivado release 2020.2. Later releases will probably work, but may require adjustments.
There are two ways to build the firmware: as a Vivado project, or in Vivado non-project mode. In most cases, non-project mode will be easier.
Preparing the build environment
Install Vivado
Download and install Vivado 2020.2.
The build scripts assume that Vivado is installed in /opt/Xilinx/Vivado/2020.2.
If a different location is used, it must be configured in the script environment file.
Configure paths
If necessary, edit the file redpitaya-puzzlefw/fpga/script_env and make sure that VIVADO_DIR points to the directory where Vivado is installed.
Install board files
When running Vivado in project mode, it requires board definition files
for the Red Pitaya.
These files are available from the original Red Pitaya FPGA repository.
Use the following steps to download and install these files.
- Go to directory
redpitaya-puzzlefw/fpga - Run
./01_get_redpitaya.sh - Copy the complete folder
redpitaya-puzzlefw/fpga/RedPitaya-FPGA/brd/redpitayato/opt/Xilinx/Vivado/2020.2/data/boards/board_files
Building FPGA firmware in non-project mode
There are two top-level designs, each targeting a specific Red Pitaya board type. These designs are built in separate design runs:
puzzlefw_topfor the normal (2-input) Red Pitayapuzzlefw_top_4chfor the 4-input Red Pitaya
The following steps invoke Vivado in non-project mode to handle synthesis, implementation and bitfile generation of each top-level design.
- Go to directory
redpitaya-puzzlefw/fpga - Run
./11_build_bitfile.sh - Run
./12_build_bitfile_4ch.sh
It is normal for the build process to display a large number of messages and warnings. The build process produces the following output files:
puzzlefw_top.bit.bin
This file is required to program the FPGA.redpitaya_puzzlefw.xsa
This file contains a description of the system configuration. It is necessary to build U-boot.- Similar files for the 4-input design.
The build process also creates various logs and report files in directory vivado/output (or output_4ch).
It is recommended to review the contents of vivado/output/post_route_timing.rpt to make sure that it does not report any timing violations and contains the line All user specified timing constraints are met.
Building FPGA firmware in project mode
The repository contains a Vivado project file to build the design for the normal (2-input) Red Pitaya. There is currently no project file for the 4-input board.
The following steps may be used to build the design in Vivado in project mode:
- Start Vivado, typically by running something like
source /opt/Xilinx/Vivado/2020.1/settings64.sh ; vivado - Open the project file
redpitaya-puzzlefw/fpga/vivado/redpitaya_puzzlefw.xpr. - In the Flow Navigator panel on the left, click on "Run Synthesis", then click "Ok". It may appear that very little is happening, but synthesis should be running in the background. The status is displayed in the Design Runs panel at the bottom of the screen.
- When synthesis completes successfully, choose "Run Implementation" and click "Ok".
- When implementation completes successfully, choose "Generate Bitstream" and click "Ok".
- When bitstream generation completes successfully, choose "View Reports".
- In the Project Summary panel, check that timing is ok (Number of Falling Endpoints should be 0).
- In the main menu bar, click File, Export, Export Hardware.
Select "Pre-synthesis".
Change XSA file name and export folder to write the XSA file to
redpitaya-puzzlefw/fpga/redpitaya_puzzlefw.xsa. Then click "Finish".
The build process produces a BIT file puzzlefw_top.bit containing the FPGA design.
The Zynq software needs this file in a different format (.bit.bin) which can not be created by the Vivado IDE.
Use the following steps to convert the BIT file:
- Go to directory
redpitaya-puzzlefw/fpga - Run
./make_binfile.sh vivado/redpitaya_puzzlefw.runs/impl_1/puzzlefw_top.bit
Editing the block design
Most source files for the FPGA firmware can be edited with any text editor.
The VHDL source files are in directory redpitaya-puzzlefw/fpga/rtl.
Constraint files are in redpitaya-puzzlefw/fpga/constraints.
The only exception is the block design that links the Zynq processing system to the FPGA logic.
The block design is stored as redpitaya-puzzlefw/fpga/vivado/redpitaya_puzzlefw.srcs/sources_1/bd/puzzlefw/puzzlefw.bd.
This file can only be edited through Vivado, as follows:
- Start Vivado as described above.
- Open the project file
redpitaya-puzzlefw/fpga/vivado/redpitaya_puzzlefw.xpr. - In the Flow Navigator panel on the left, click on "Open Block Design".
- Make changes as needed.
- In the main menu bar, click File, Save Block Design.
Both top-level designs (2-input and 4-input boards) use the same block design file.
This is a tricky situation because the block design file targets a specific FPGA part (e.g. xc7z010clg400-1), but the two boards have different FPGA parts.
When using the non-project build flow, we find that this just seems to work without issues.
During the build flow, Vivado quietly modifies the block design file to match the target part of the design run.
Adding VHDL files to the project
When VHDL files are added to the project, both the Vivado project and the non-project build script must be updated.
To update the Vivado project:
- Open the project file
redpitaya-puzzlefw/fpga/vivado/redpitaya_puzzlefw.xpr. - In the Flow Navigator panel on the left, click "Add Sources".
- Add VHDL files directly from the directory
redpitaya-puzzlefw/fpga/rtl. Do not select "Copy sources into project". - Vivado may get a confused because, by default, it does not support VHDL-2008. To fix this, in the Sources panel, click "Libraries" below the hierachy tree. Right-click each new VHDL file, choose "Set File Type" and change the file type to "VHDL 2008".
Vivado stores all project settings in the XPR file. Changes to that file must be tracked in the Git repository.
To update the non-project build script:
- Open
redpitaya-puzzlefw/fpga/vivado/nonproject.tclin a text editor. - Add
read_vhdlstatements to load the new VHDL files.
Building embedded software
Preparing the build environment
Install the following Debian packages (or equivalent packages on other Linux distributions):
build-essential,
bc,
bzip2,
cpio,
dosfstools,
file,
git,
libncurses-dev,
mtools,
patch,
perl,
rsync,
unzip,
wget.
Downloading software
Use the following steps to download required software packages:
- Go to directory
redpitaya-puzzlefw/sw - Run
./01_get_buildroot.shto download Buildroot. - Run
./02_get_uboot.shto download U-Boot. - Run
./03_get_kernel.shto download the Xilinx distribution of the Linux kernel.
Building embedded software
Use the following steps to build the embedded software:
- Go to directory
redpitaya-puzzlefw/sw - Run
./11_build_buildroot.shto configure and build Buildroot.
One of the outcomes of this step is a cross-compilation toolchain for the ARM architecture. Other build steps need this toolchain, therefore this must be the first step of the build flow. - Run
./12_build_uboot.shto configure and build U-Boot.
This step requires the fileredpitaya-puzzlefw/fpga/redpitaya_puzzlefw.xsafrom the FPGA build flow. - Run
./13_build_kernel.shto configure and build the Linux kernel. - Run
./14_build_devicetree.shto build the device tree. - Run
./15_build_driver.shto build the Linux kernel module that provides access to the FPGA firmware. - Run
./16_build_userspace.shto build user space applications that will run on the Red Pitaya. - Run
./21_rebuild_rootfs.shto re-build the embedded root filesystem, including the kernel driver and user space tools that were built during previous steps. - Run
./22_prepare_sdcard.shto collect the files that must be installed on the SD card for the Red Pitaya. - Run
./23_sdcard_image.shto build an image file which can be written to the SD card.
Changing the Buildroot configuration
The Buildroot configuration for this project is stored in the folder config.
To change the configuration, start by applying the existing settings, then run the Buildroot configuration tool, then copy the new settings to the config folder.
Use the following steps:
- Copy
sw/config/buildroot_puzzlefw_defconfigtosw/buildroot-2023.02.08/.config - Go to
sw/buildroot-2023.02.8 - Run
make olddefconfig - Run
make nconfig - Use the menu to change the configuration as needed.
- Run
make savedefconfig - Copy
sw/buildroot-2023.02.08/defconfigtosw/config/buildroot_puzzlefw_defconfig
After changing the Buildroot configuration, rerun step 11_build_buildroot.sh.
Changing the U-Boot configuration
The U-Boot configuration for this project is stored in the folder config.
To change the configuration, start by applying the existing settings, then run the U-boot configuration tool, then copy the new settings to the config folder.
Use the following steps:
- Copy
sw/config/uboot_redpitaya_puzzlefw_defconfigtosw/u-boot/configs/redpitaya_puzzlefw_defconfig - Go to
sw/u-boot - Run
make redpitaya_puzzlefw_defconfig - Run
make nconfig - Use the menu to change the configuration as needed.
- Run
make savedefconfig - Copy
sw/u-boot/defconfigtosw/config/uboot_redpitaya_puzzlefw_defconfig
After changing the Buildroot configuration, rerun step 12_build_uboot.sh.
Changing the Linux kernel configuration
The Linux kernel configuration for this project is stored in the folder config.
To change the configuration, start by applying the existing settings, then run the kernel configuration tool, then copy the new settings to the config folder.
Use the following steps:
- Copy
sw/config/linux_redpitaya_puzzlefw_defconfigtosw/linux-xlnx/.config - Go to
sw/linux-xlnx - Run
make ARCH=arm olddefconfig - Run
make ARCH=arm nconfig - Use the menu to change the configuration as needed.
- Run
make ARCH=arm savedefconfig - Copy
sw/linux-xlnx/defconfigtosw/config/linux_redpitaya_puzzlefw_defconfig
After changing the Buildroot configuration, rerun step 13_build_kernel.sh.
Preparing the SD card
This section explains how to set up the SD card manually. It is not normally necessary to do this. An easier way to set up the SD card is by building an image file and writing it to the card.
The SD card contains two partitions:
/dev/mmcblk0p1is a 256 MB partition with FAT filesystem/dev/mmcblk0p2is a 256 MB partition with an Ext4 filesystem
The FAT partition contains the following files:
| File | Description |
|---|---|
boot.bin |
first stage boot loader for the Zynq (built by U-Boot) |
u-boot.img |
main boot loader program (U-Boot) |
boot.scr |
boot script for U-Boot |
devicetree.dtb |
device tree for the Linux kernel |
uImage |
Linux kernel image |
rootfs.cpio.uboot |
root filesystem image |
puzzlefw_top.bit.bin |
FPGA firmware image for 2-input board |
puzzlefw_top_4ch.bit.bin |
FPGA firmware image for 4-input board |
The Ext4 partition can be left empty initially. Configuration files will be written to this partition by the embedded system.
The following commands may be used to format the two partitions:
mkdosfs -F 16 /dev/mmcblk0p1
mke2fs -t ext4 -b 4096 /dev/mmcblk0p2